In the field of image processing, intensity transformations and spatial filtering are fundamental techniques used to enhance, modify, or analyze images. These methods often rely on precise models and algorithms, but many real-world scenarios involve uncertainties, imprecision, or vagueness that traditional approaches may struggle to handle effectively. This is where fuzzy techniques come into play.
Fuzzy logic, inspired by human reasoning and decision-making, provides a framework for managing uncertainty and imprecision. By using fuzzy sets and membership functions, it allows for flexible representation and manipulation of data. In the context of image processing, fuzzy techniques enable more adaptive and intelligent transformations, especially when dealing with complex images or ambiguous visual information.
- Intensity Transformations: Fuzzy techniques can be used to enhance image contrast, adjust brightness, and emphasize specific features. By defining fuzzy rules and membership functions, intensity transformations can be tailored to respond to varying image characteristics in a more nuanced way.
- Spatial Filtering: Fuzzy approaches improve traditional filtering by incorporating context and adapting to local image variations. This is particularly useful for noise reduction, edge detection, and texture analysis, where hard thresholds may fail to capture subtle details.
1. Fundamentals of Fuzzy Logic
Fuzzy logic extends classical Boolean logic by introducing the concept of partial truth values between 0 and 1. This allows for a more nuanced representation of information, where an element can partially belong to a set.
1.1. Membership Functions
A membership function assigns a degree of membership to each element in a set . For example, in the context of image processing, we might define a fuzzy set of “bright pixels” with a membership function that assigns higher values to brighter pixels.
2. Fuzzy Intensity Transformations
Intensity transformations are used to modify the pixel values of an image to enhance its appearance or to highlight certain features. Fuzzy techniques can be particularly effective in dealing with images with varying illumination and contrast conditions.
2.1. Fuzzy Histogram Equalization
Fuzzy histogram equalization improves the contrast of an image by redistributing the intensity values more evenly. Unlike traditional histogram equalization, which uses crisp intensity values, fuzzy histogram equalization uses fuzzy sets and membership functions.
Fuzzification: Convert the image intensity values into fuzzy sets using membership functions.
where is the membership value of intensity , is the center of the fuzzy set, and is the width of the fuzzy set.
Equalization: Apply histogram equalization on the fuzzy membership values.
where is the cumulative distribution function of the fuzzy membership values.
Defuzzification: Convert the fuzzy membership values back to intensity values.
2.2. Fuzzy Contrast Stretching
Fuzzy contrast stretching enhances the contrast of an image by stretching the range of the fuzzy membership values.
Fuzzification: Convert intensity values to fuzzy sets as before.
Stretching: Apply a linear transformation to the fuzzy membership values.
where and are stretching parameters.
Defuzzification: Convert the stretched fuzzy membership values back to intensity values using the inverse of the fuzzification function.
3. Fuzzy Spatial Filtering
Spatial filtering modifies the spatial structure of an image to enhance features or reduce noise. Fuzzy techniques allow for more adaptive and context-sensitive filtering.
3.1. Fuzzy Smoothing Filters
Fuzzy smoothing filters reduce noise while preserving edges by considering the local context of each pixel.
Fuzzification: Convert the neighborhood of each pixel into fuzzy sets using membership functions.
Fuzzy Aggregation: Compute a weighted average of the fuzzy membership values in the neighborhood.
where is the neighborhood of pixel , and are weights based on the spatial distance from .
Defuzzification: Convert the aggregated fuzzy membership values back to intensity values.
3.2. Fuzzy Edge Detection
Fuzzy edge detection enhances the edges in an image by considering the gradient magnitude and direction in a fuzzy manner.
Fuzzification: Compute the gradient magnitude and direction for each pixel and convert them into fuzzy sets.
where is the gradient magnitude, is a reference gradient magnitude, and controls the spread of the fuzzy set.
Fuzzy Inference: Use fuzzy rules to infer the presence of edges based on the gradient magnitude and direction.
where is the fuzzy edge membership value at pixel .
Defuzzification: Convert the fuzzy edge membership values back to intensity values to obtain the edge-enhanced image.
4. Combining Fuzzy Techniques
Combining fuzzy intensity transformations and spatial filtering can lead to more robust and adaptive image enhancement. Here is a typical procedure:
Fuzzification: Convert the original image intensity values to fuzzy sets.
Fuzzy Intensity Transformation: Apply fuzzy histogram equalization or fuzzy contrast stretching.
Fuzzy Spatial Filtering: Apply fuzzy smoothing or edge detection to the transformed fuzzy sets.
Defuzzification: Convert the processed fuzzy membership values back to intensity values.
Principles of Fuzzy Set Theory
Fuzzy set theory, introduced by Lotfi Zadeh in 1965, extends classical set theory to handle the concept of partial truth, where an element’s membership in a set can range between complete membership and complete non-membership. This framework is particularly useful in dealing with uncertain, imprecise, or vague information, and has applications in various fields including control systems, decision making, and artificial intelligence.
Basic Concepts
Fuzzy Sets: A fuzzy set in a universe of discourse is characterized by a membership function . This function assigns each element a membership value within the interval , where 0 indicates no membership and 1 indicates full membership.
Example: Consider the set of “tall people”. In classical set theory, a person either belongs to the set of tall people or not. In fuzzy set theory, each person has a degree of membership to the set of tall people based on their height. For instance, if is a person with a height of 180 cm, the membership function might assign a value of 0.8, indicating that this person is “mostly tall”.
Membership Functions
The choice of membership function is critical in fuzzy set theory. Common types of membership functions include:
Triangular Membership Function: Defined by three parameters , , and where . The function is given by:
Trapezoidal Membership Function: Defined by four parameters , , , and where . The function is given by:
Gaussian Membership Function: Defined by the parameters (mean) and (standard deviation). The function is given by:
Operations on Fuzzy Sets
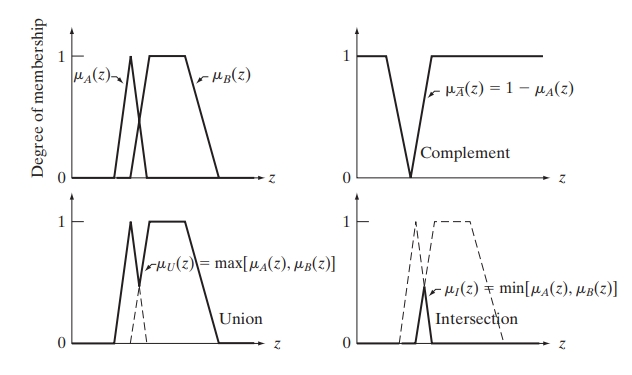
Fuzzy set theory generalizes classical set operations to handle degrees of membership.
Union: The membership function of the union of two fuzzy sets and is given by:
Intersection: The membership function of the intersection of two fuzzy sets and is given by:
Complement: The membership function of the complement of a fuzzy set is given by:
Fuzzy Relations
Fuzzy relations extend the concept of classical relations to fuzzy sets. A fuzzy relation between two fuzzy sets and in the universes of discourse and is characterized by a membership function .
Composition of Fuzzy Relations: Given two fuzzy relations and , the composition is defined by:
Fuzzy Logic
Fuzzy logic is an extension of Boolean logic that deals with reasoning that is approximate rather than fixed and exact. In fuzzy logic, truth values are expressed as degrees of truth ranging between 0 and 1. Fuzzy logic uses linguistic variables, which are described by fuzzy sets.
Fuzzy Inference Systems (FIS): These systems use fuzzy set theory and fuzzy logic to map inputs to outputs. An FIS consists of three main components:
- Fuzzification: Converts crisp inputs into fuzzy sets.
- Inference Engine: Applies fuzzy rules to the fuzzy inputs to generate fuzzy outputs.
- Defuzzification: Converts fuzzy outputs back into crisp values.
Example: Consider a simple FIS for controlling the temperature of a room:
- Input: Current temperature (crisp value).
- Fuzzification: Transform the current temperature into fuzzy sets such as “cold”, “warm”, “hot”.
- Inference: Apply fuzzy rules like “If the temperature is cold, then increase the heater” to determine the output fuzzy set.
- Defuzzification: Convert the output fuzzy set back to a crisp value, which determines the heater setting.
Applications of Fuzzy Set Theory
Fuzzy set theory has numerous practical applications, including:
- Control Systems: Used in various control systems, such as air conditioning, washing machines, and automotive systems, to handle imprecise inputs and provide smooth control actions.
- Decision Making: Helps in multi-criteria decision making where criteria and their importance are not precisely defined.
- Pattern Recognition: Used in image processing and pattern recognition to classify objects with imprecise boundaries.
- Artificial Intelligence: Enhances AI systems by allowing them to deal with uncertainty and partial truths, improving decision-making processes in expert systems.
Fuzzy set theory provides a powerful tool for modeling and reasoning with uncertain, imprecise, or vague information. By extending classical set theory, it offers a flexible framework that can be applied to a wide range of real-world problems, enabling more nuanced and effective solutions. Its mathematical foundations, characterized by the use of membership functions and fuzzy logic, make it a vital component of modern computational intelligence and decision-making systems.
Using Fuzzy Sets for Intensity Transformations
Intensity transformations are fundamental in image processing, aiming to enhance or modify the visual appearance of images. These transformations adjust the pixel intensity values to achieve better contrast, highlight certain features, or prepare images for further analysis. Fuzzy set theory provides a robust framework for handling the uncertainty and vagueness inherent in image data, enabling more nuanced and flexible intensity transformations.
Basic Concepts
Fuzzy Sets: In the context of image processing, a fuzzy set can be used to represent a specific range of pixel intensities in a grayscale image. The membership function assigns each intensity value a membership degree, indicating how strongly that intensity belongs to the fuzzy set .
Example: For an image with intensity values ranging from 0 (black) to 255 (white), a fuzzy set might represent “dark” pixels. The membership function could assign higher values to lower intensities (closer to 0) and lower values to higher intensities (closer to 255).
Membership Functions in Intensity Transformations
Various types of membership functions can be utilized to model different intensity levels:
Triangular Membership Function:
Here, , , and define the shape of the triangle, where and are the endpoints, and is the peak.
Gaussian Membership Function:
This function is defined by the mean and the standard deviation , providing a smooth bell-shaped curve.
Trapezoidal Membership Function:
Defined by , , , and , this function creates a trapezoid shape, which is useful for representing intensity ranges with a flat top.
Fuzzy Intensity Transformation Process
The process of using fuzzy sets for intensity transformations involves several key steps:
Fuzzification: Convert the pixel intensities of the image into fuzzy values using a suitable membership function. This step maps each intensity value to a membership degree .
Application of Fuzzy Rules: Apply a set of fuzzy rules to modify the fuzzy membership values. These rules can be designed to enhance contrast, highlight certain intensity ranges, or achieve other desired effects.
Defuzzification: Convert the modified fuzzy membership values back into crisp intensity values. This step maps the fuzzy values to new intensity values, resulting in the transformed image.
Example: Contrast Enhancement
Let’s consider a simple example of using fuzzy sets for contrast enhancement in a grayscale image.
Fuzzification: Define a fuzzy set to represent “dark” pixels and another fuzzy set to represent “bright” pixels. For simplicity, use triangular membership functions for both sets:
Application of Fuzzy Rules: Define fuzzy rules to enhance contrast:
- Rule 1: If a pixel is dark, make it darker.
- Rule 2: If a pixel is bright, make it brighter.
These rules can be implemented by adjusting the membership functions. For instance:
Defuzzification: Convert the modified membership values back to crisp intensity values. One common method is the centroid method, which calculates the center of gravity of the membership function:
Apply the same process for the modified fuzzy set :
Replace the original pixel intensities with the defuzzified values to get the enhanced image.
Practical Considerations
Choosing Membership Functions: The choice of membership functions significantly impacts the effectiveness of the intensity transformation. Triangular, trapezoidal, and Gaussian functions are commonly used due to their simplicity and ease of computation.
Defuzzification Methods: While the centroid method is widely used, other defuzzification methods such as the mean of maxima (MOM) or the smallest of maxima (SOM) can also be applied, depending on the specific requirements of the application.
Computational Complexity: Fuzzy intensity transformations can be computationally intensive, especially for large images. Efficient algorithms and parallel processing techniques can help mitigate this issue.
Applications
Fuzzy set-based intensity transformations have various applications in image processing:
- Medical Imaging: Enhancing the contrast of medical images (e.g., X-rays, MRI scans) to highlight specific tissues or abnormalities.
- Remote Sensing: Improving the visibility of features in satellite or aerial images for better analysis and interpretation.
- Surveillance: Enhancing the visibility of objects or individuals in surveillance footage under varying lighting conditions.
- Photography: Adjusting the contrast and brightness of digital photographs to achieve desired artistic effects.
Using fuzzy sets for intensity transformations provides a powerful and flexible approach to image enhancement. By incorporating the concepts of fuzzy membership and fuzzy rules, this method can handle the inherent uncertainty and vagueness in image data, resulting in more effective and adaptive transformations. The mathematical framework of fuzzy set theory, combined with practical considerations, makes it a valuable tool in the field of image processing.
Using Fuzzy Sets for Spatial Filtering
Spatial filtering is a crucial technique in image processing, applied to modify or enhance the appearance of an image. It involves manipulating the pixel values based on their spatial neighborhood. Fuzzy set theory enhances spatial filtering by providing a flexible and robust framework for handling uncertainties and imprecise information inherent in images. This approach is particularly beneficial for tasks such as noise reduction, edge detection, and texture analysis.
Basic Concepts
Fuzzy Sets: In the context of spatial filtering, a fuzzy set in a universe of discourse (representing pixel intensities) is characterized by a membership function . This function assigns a degree of membership to each pixel intensity, representing how strongly each pixel belongs to a specific fuzzy set.
Example: Consider an image with pixel intensity values ranging from 0 (black) to 255 (white). A fuzzy set might represent “noisy” pixels, with the membership function assigning higher values to pixels that are more likely to be affected by noise.
Fuzzy Membership Functions in Spatial Filtering
Membership functions in spatial filtering can take various forms, each suited to different types of spatial characteristics:
Triangular Membership Function:
Parameters , , and define the shape, where and are the bounds, and is the peak.
Gaussian Membership Function:
Parameters (mean) and (standard deviation) shape the function, providing a smooth, bell-shaped curve.
Trapezoidal Membership Function:
Parameters , , , and create a trapezoid, useful for defining intensity ranges with a flat top.
Fuzzy Spatial Filtering Process
The fuzzy spatial filtering process involves several steps:
Fuzzification: Convert the pixel intensities and their spatial neighborhoods into fuzzy values using appropriate membership functions. This maps each pixel and its neighbors to membership degrees.
Fuzzy Rules Application: Apply a set of fuzzy rules to modify the fuzzy membership values based on the spatial characteristics of the pixels. These rules can be designed to reduce noise, enhance edges, or achieve other spatial filtering goals.
Aggregation: Combine the results from the fuzzy rules to obtain a single fuzzy value for each pixel.
Defuzzification: Convert the aggregated fuzzy values back into crisp intensity values to form the filtered image.
Example: Fuzzy Filtering for Noise Reduction
Let’s consider a simple example of using fuzzy sets for noise reduction in a grayscale image.
Fuzzification: Define a fuzzy set to represent “noisy” pixels. Use a Gaussian membership function for this purpose:
where is the local mean intensity of the pixel’s neighborhood, and is the standard deviation.
Fuzzy Rules Application: Define fuzzy rules to smooth the image:
- Rule 1: If a pixel is noisy, replace it with the local mean.
- Rule 2: If a pixel is not noisy, keep its original value.
These rules can be expressed as:
where is the modified membership value.
Aggregation: Combine the fuzzy values from the rules. In this case, the aggregation step simply involves taking the modified membership value .
Defuzzification: Convert the aggregated fuzzy values back to crisp values. Since is already a crisp value (a weighted average of the local mean and the original intensity), it directly represents the filtered intensity.
Replace each pixel intensity with to obtain the noise-reduced image.
Practical Considerations
Choosing Membership Functions: The effectiveness of fuzzy spatial filtering depends on the choice of membership functions. Gaussian functions are commonly used for noise reduction due to their smoothness, while triangular and trapezoidal functions are suitable for edge detection and texture analysis.
Fuzzy Rules Design: Designing effective fuzzy rules requires understanding the specific spatial characteristics of the image. Domain knowledge can guide the creation of rules that appropriately address noise, edges, and textures.
Computational Complexity: Fuzzy spatial filtering can be computationally intensive, especially for large images or complex membership functions. Efficient algorithms and hardware acceleration techniques (e.g., GPUs) can help mitigate this issue.
Applications
Fuzzy spatial filtering has various applications in image processing:
- Noise Reduction: Removing noise from images captured in low light or with high ISO settings, preserving details while reducing artifacts.
- Edge Detection: Enhancing the edges in an image to facilitate object detection and recognition tasks.
- Texture Analysis: Analyzing and enhancing textures in images for applications in medical imaging, remote sensing, and materials science.
- Image Restoration: Improving the quality of degraded images by addressing blurring, noise, and other distortions.
References
Zadeh, L. A. (1965). “Fuzzy sets.” Information and Control, 8(3), 338-353.
Gonzalez, R. C., & Woods, R. E. (2002). Digital image processing. Prentice Hall.
Jain, R., Kasturi, R., & Schunck, B. G. (1995). Machine vision. McGraw-Hill.
Russo, F., & Ramponi, G. (1994). “Fuzzy operators for image processing.” IEEE Transactions on Fuzzy Systems, 2(3), 232-240.
Wang, L. X. (1997). A course in fuzzy systems and control. Prentice Hall.